感知机(Perceptron)是1958 年由弗兰克·罗森布拉特(Frank Rosenblatt)提出的一个经典线性分类算法。它是机器学习领域最早提出的基于数学规则进行分类的模型之一,适用于解决二分类问题。
作为一种线性分类算法,感知机能够快速处理线性可分的二分类问题,且实现起来非常容易。然而,它只能解决线性可分的问题,对于非线性可分的数据无法有效分类。感知机对噪声非常敏感,错误的标签或异常数据会导致模型的不稳定。
简言之:感知机算法适合线性可分的问题场景。
1. 基本原理
接下来,我们将探讨感知机算法如何进行分类,以及训练。
1.1 预测过程
感知机是一个线性分类器,公式表示如下:

\( w \) 表示权重向量, \( b \) 表示偏置, \( x \) 表示输入向量, \( sign(·) \) 表示符号函数。
当预测某个数据的类别,感知机会根据输入数据的特征计算得到决策函数值,然后根据该决策函数值的符号来决定其类别。如果为 > 0,归类为 +1 类别,如果 <= 0,则归类到 -1 类别。
注意:感知机算法在内部使用 +1 和 -1 来表示两个类别,这个不同于某些二分类算法使用 0 和 1 来表示两个类别。
对于权重向量 \( w \) 和偏置 \( b \) 的理解:
- 权重向量 \( w \) 表示每个特征对预测结果的影响程度,特征权重越大,表示该特征越能影响分类预测的结果。特征的权重可以是正的也可以是负的,表明某个特征对分类预测贡献是 推动分类结果为正 还是 推动分类结果为负。

- 偏置项 b 的作用是调整决策边界的位置。如果没有偏置项,感知机的决策边界总是会经过原点,这会限制模型的拟合能力,使它无法适应某些分布的数据。如果数据已经进行了标准化(Standardization)或归一化(Normalization),特别是特征均值被调整为 0,那么偏置的作用可能会被抵消。这种情况下,偏置可以被省略而不影响模型性能。
最后需要明确,对于感知机,权重向量 \( w \) 和偏置 \( b \) 是算法要学习的参数。
1.2 训练过程
感知机训练的目标是不断调整参数 \( w \) 和 \( b \) ,使得训练数据中尽可能多的样本能够被分类正确,感知机的学习效果就越好。感知机通过使用:误分类样本的损失函数 来表示模型对训练数据的学习效果。对于一个给定的样本 \( (x_i, y_i) \),其损失定义为:

- 正确分类:当 \( y_{i}(w^{T}x + b) > 0 \) 时,预测正确,损失为 0。
- 错误分类:当 \( y_{i}(w^{T}x + b) \leq 0 \) 时,预测错误,损失为 \(−y_{i}(w^{T}x + b)\),即对错误分类样本的惩罚。
将所有样本的损失值累加一起,就表示感知机的训练效果。损失值越小,训练效果越好,损失值越大,训练效果越差。
如何调整 \( w \) 和 \( b \) 使得损失函数降低?
在训练过程中,遍历训练集中每个样本,如果某个样本被误分类(即损失为非零值),感知机会根据 误分类样本 使用梯度下降算法来调整参数 \( w \) 和偏置\( b \)。更新规则如下:



η 表示参数学习率,用于控制每次参数更新的步长。
简言之:感知机通过不断调整权重 \( w \) 和 \( b \),利用误分类样本的损失函数,采用梯度下降法来优化参数,使得模型能够正确分类尽可能多的训练样本,从而降低整体损失。
2. 计算过程
from sklearn.datasets import make_blobs
import matplotlib.pyplot as plt
import numpy as np
class MyPercetron:
def __init__(self):
# 初始化参数
np.random.seed(42)
self.weight = np.random.randn(1, 2)
self.intercept = np.zeros(1)
self.learning_rate = 1e-4
def decision_function(self, x):
"""决策函数"""
return np.dot(x, self.weight.T) + self.intercept
def loss_function(self, score, y_true):
"""损失函数"""
return max(0, - score[0] * y_true)
def optimizer(self, x, y):
"""更新参数"""
self.weight -= self.learning_rate * (-y * x)
self.intercept -= self.learning_rate * (-y)
def predict(self, x):
"""预测函数"""
y_pred = np.sign(self.decision_function(x))
return y_pred.squeeze()
def score(self, x, y_true):
"""评估函数"""
y_pred = self.predict(x)
return (y_pred== y_true).sum() / len(y_true)
def fit(self, x, y):
"""训练函数"""
for idx in range(200):
for data_x, data_y in zip(x, y):
score = self.decision_function(data_x)
loss = self.loss_function(score, data_y)
if loss > 0:
self.optimizer(data_x, data_y)
def plot_decision_boundary(estimator, x, y):
# 生成网格点
x1, x2 = np.meshgrid(
np.linspace(x[:, 0].min() - 1, x[:, 0].max() + 1, 1000),
np.linspace(x[:, 1].min() - 1, x[:, 1].max() + 1, 1000))
# 网格点预测
data = np.c_[x1.ravel(), x2.ravel()]
y_pred = estimator.predict(data)
# 绘制等高线图
plt.contourf(x1, x2, y_pred.reshape(1000, 1000), cmap=plt.cm.Blues)
# 绘制训练数据
plt.scatter(x[:, 0], x[:, 1], c=y)
plt.show()
def test():
# 构造训练数据
x, y = make_blobs(n_samples=1000, centers=2, n_features=2, random_state=0)
y = np.where(y == 0, -1, y) # 将 0 类别使用 -1 表示
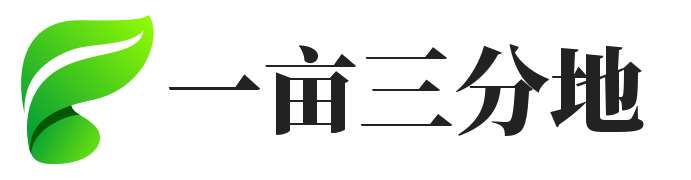
# 训练前的决策边界
estimator = MyPercetron()
plot_decision_boundary(estimator, x, y)
print('Acc:', estimator.score(x, y))
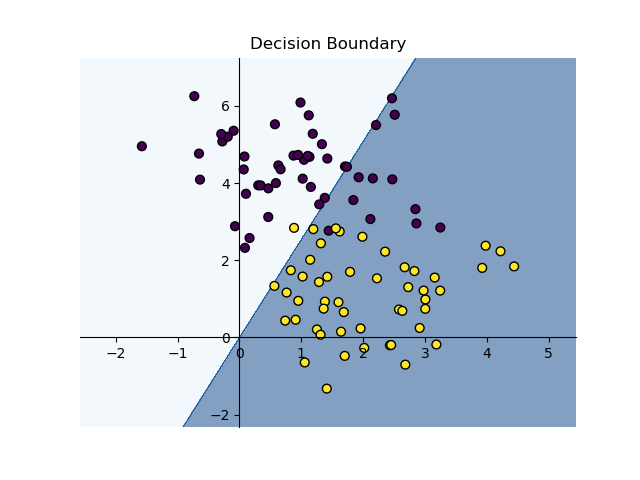
# 训练后的决策边界
estimator.fit(x, y)
plot_decision_boundary(estimator, x, y)
print('Acc:', estimator.score(x, y))
if __name__ == '__main__':
test()
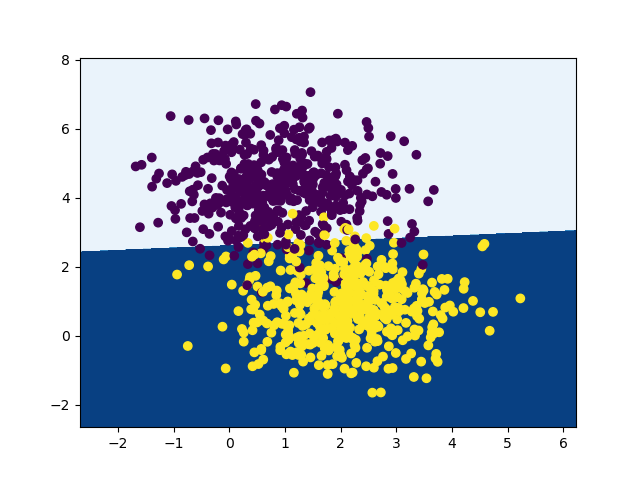
训练前(随机参数,左图)Acc: 0.796,训练前(右图)Acc: 0.956
3. 参数详解
from sklearn.datasets import make_blobs
import numpy as np
from sklearn.linear_model import Perceptron
def test():
x, y = make_blobs(n_samples=1000, centers=2, n_features=2, random_state=0)
estimator = Perceptron(
penalty=None,
alpha=0.0001,
l1_ratio=0.15,
fit_intercept=True,
max_iter=1000,
tol=1e-3,
shuffle=True,
verbose=0,
eta0=1.0,
n_jobs=None,
random_state=0,
early_stopping=False,
validation_fraction=0.1,
n_iter_no_change=5,
class_weight=None,
warm_start=False)
estimator.fit(x, y)
print('Acc:', estimator.score(x, y))
if __name__ == '__main__':
test()
5.1 正则化参数
penalty : {'l2', 'l1', 'elasticnet'}, 默认值:None
- 控制正则化类型,即惩罚项(正则化项)。它有三个选择:
'l2':L2 正则化(岭回归),即加入权重平方的惩罚项。'l1':L1 正则化(Lasso 回归),即加入权重绝对值的惩罚项。'elasticnet':弹性网正则化,是 L1 和 L2 正则化的混合,使用了比例参数l1_ratio来调整 L1 和 L2 的混合比例。
alpha : float, 默认值:0.0001
- 这是正则化项的常数系数,用来控制正则化的强度。它决定了惩罚项的权重。如果设置较大,正则化效果更强,可能导致过拟合问题的缓解;如果设置较小,正则化的效果较弱。
l1_ratio : float, 默认值:0.15
只有在 penalty='elasticnet' 时才会用到。它是弹性网正则化的混合参数,决定 L1 正则化与 L2 正则化的比例。l1_ratio=0 完全是 L2 正则化,l1_ratio=1 完全是 L1 正则化。0 <= l1_ratio <= 1 的值表示在 L1 和 L2 之间的加权混合。
5.2 训练相关参数
fit_intercept : bool, 默认值:True
- 是否计算截距(偏置项)。如果设为
False,则认为数据已经进行了中心化处理(即均值为 0)。如果设为True,模型会估计截距。
max_iter : int, 默认值:1000
- 最大的迭代次数(即最大 epoch 数)。如果在这个次数内模型还没有收敛,训练会停止。对于感知机来说,可能导致训练较长时间,尤其是在数据复杂时。
tol : float or None, 默认值:1e-3
- 停止准则。训练将停止当
loss > previous_loss - tol,即如果损失值的变化小于该值,则停止训练。如果是None,则不会使用停止准则。
shuffle : bool, 默认值:True
- 是否在每个 epoch 后打乱训练数据。通常,打乱数据有助于避免模型学习到数据的顺序特性,提高泛化能力。
eta0 : float, 默认值:1
更新时使用的初始学习率。学习率是训练过程中的重要参数,决定了模型参数更新的幅度。较高的学习率可能导致不收敛,较低的学习率可能导致训练时间过长。
class_weight : dict 或 "balanced", 默认值:None
- 为每个类别设置权重,可以使用
{class_label: weight}的字典形式指定,也可以设置为"balanced",表示自动根据类别频率进行调整。通过class_weight,可以平衡数据集中的类别不平衡问题,帮助模型更好地学习少数类。
warm_start : bool, 默认值:False
如果设置为 True,则会在调用 fit 时使用上次调用的模型参数作为初始化,而不是重新开始训练。这个参数通常用于增量学习,尤其在大数据或在线学习场景中。
5.3 训练控制参数
n_jobs : int, 默认值:None
- 并行计算时使用的 CPU 核心数。
None表示使用 1 个 CPU 核心,-1表示使用所有可用的 CPU 核心。这个参数在多类别问题的 OVA(One vs All)训练中比较常见。
random_state : int, RandomState 实例或 None, 默认值:0
- 用于打乱训练数据的随机种子。如果设置了
random_state,则每次训练的结果是可重现的。
early_stopping : bool, 默认值:False
- 是否使用早停(Early Stopping)。当验证集的得分在多个 epoch 中没有改善时,训练将会停止。这个参数通常用于避免过拟合,尤其是在验证集上性能不再提升时。
validation_fraction : float, 默认值:0.1
- 如果使用
early_stopping=True,该参数控制从训练数据中抽取多少比例作为验证集。通常使用 10%(即 0.1)来评估模型在训练过程中的表现。
n_iter_no_change : int, 默认值:5
- 如果训练在连续
n_iter_no_change次迭代中没有任何改进,训练会停止。这个参数与早停机制密切相关。
 冀公网安备13050302001966号
冀公网安备13050302001966号