在训练深度模型(如 RNN、Transformer)时,由于网络层数较深,随着训练进行,网络各层的输入分布不断变化,这会导致训练变慢,甚至无法收敛。为了解决这个问题,层归一化(LN)应运而生。它通过标准化每一层的输出,减少层间输入分布的差异,从而加速训练并提高收敛性。
需要注意的是,批量归一化(BN)在处理数据时,会计算整个批次的均值和方差来标准化每个特征,而层归一化则在每个样本内独立计算该样本的均值和方差,对该样本的所有特征进行标准化。假设我们有以下两个样本组成一个批次:
| 样本 | 特征1 | 特征2 | 特征3 |
|---|---|---|---|
| 样本1 | 1.0 | 2.0 | 3.0 |
| 样本2 | 4.0 | 5.0 | 6.0 |
- 批量归一化会在整个批次上计算每个特征的均值和方差,然后用这些值来标准化每个特征。
- 层归一化则会在每个样本内独立计算均值和方差,标准化每个样本的所有特征。
1. LN 计算公式

- \( x \) 表示输入数据
- \( E[x] \) 表示 token 或者 sentence 的均值
- \( Var(x) \) 表示 token 或者 sentence 的方差
- \( \epsilon \) 是一个小常数 1e-5,用于避免除以零的情况
- \( \gamma \) 是学习参数,用来控制标准化后的数据的尺度。该参数会通过反向传播进行更新
- \( \beta \) 是学习参数,用来控制标准化后的数据的平移(数据的均值调整)。该参数也会通过反向传播进行更新
经过 LN 后每个 Token 的分布调整为均值为 0,方差为 1,然后再通过 γ、β 参数对数据分布进行调整,使得网络能够根据数据的特性、适应不同的输入分布,从而进行更合适的学习,提高训练稳定性并加速收敛。
LN 和 BN 一样,通常用在激活函数之前。这是因为激活函数的作用是引入非线性,使得神经网络能够学习复杂的模式和函数。如果 LN 在激活函数之后执行,它会在已经非线性的输出上进行标准化,这可能破坏网络的表达能力和非线性特性,影响模型的学习能力。
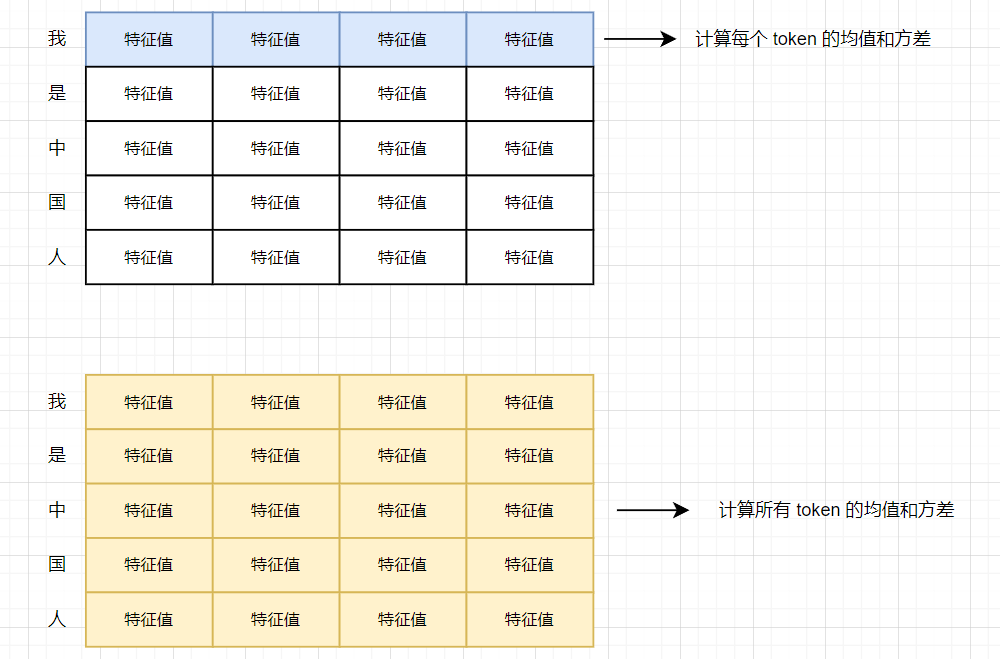
注意:LN 可以灵活地进行归一化,并且可以选择以 sentence 或 token 为单位进行归一化,具体取决于任务需求和应用场景。另外,LN 不需要在训练时累计 BN 的 running_mean 和 running_var 值。
2. LN 使用示例
LN 如果以 token 为单位归一化,则需要计算每个 token 的均值和方差。如果以 sentence 为单位进行归一化,则将 sentence 中的所有值计算均值和方差。
import torch.nn as nn
import torch
torch.manual_seed(42)
batch, seq_len, dim = 2, 3, 4
batch_inputs = torch.rand(size=(batch, seq_len, dim))
def test01():
# 以 Token 为单位
layer_norm = nn.LayerNorm(normalized_shape=dim, eps=1e-5, elementwise_affine=False, bias=False)
output = layer_norm(batch_inputs)
print(output)
# 以句子为单词
layer_norm = nn.LayerNorm(normalized_shape=(seq_len, dim), eps=1e-5, elementwise_affine=False, bias=False)
output = layer_norm(batch_inputs)
print(output)
def test02():
# 以 Token 为单位
mean = torch.mean(batch_inputs, dim=2)
var = torch.var(batch_inputs, dim=2, unbiased=False)
print('均值:', mean, '方差:', var)
outputs = (batch_inputs - mean.view(2, 3, 1)) / torch.sqrt(var.view(2, 3, 1) + 1e-5)
print(outputs)
# 以句子为单词
mean = torch.mean(batch_inputs, dim=(1, 2))
var = torch.var(batch_inputs, dim=(1, 2), unbiased=False)
print('均值:', mean, '方差:', var)
outputs = (batch_inputs - mean.view(2, 1, 1)) / torch.sqrt(var.view(2, 1, 1) + 1e-5)
print(outputs)
if __name__ == '__main__':
test01()
print('-' * 50)
test02()
程序执行结果:
tensor([[[ 0.4168, 0.5568, -1.7200, 0.7464],
[-0.5865, 0.4426, -1.2412, 1.3851],
[ 0.8792, -1.5672, 0.8605, -0.1725]],
[[ 1.3004, -0.5034, 0.5333, -1.3303],
[ 1.3505, -0.0656, -1.4626, 0.1778],
[-0.8480, -0.0826, -0.7264, 1.6570]]])
tensor([[[ 0.8209, 0.9359, -0.9335, 1.0915],
[-0.9069, -0.1676, -1.3772, 0.5096],
[ 1.0264, -1.8107, 1.0047, -0.1933]],
[[ 1.3728, 0.0045, 0.7909, -0.6228],
[ 1.4455, 0.0326, -1.3612, 0.2754],
[-1.3474, -0.5685, -1.2236, 1.2017]]])
--------------------------------------------------
均值: tensor([[0.7849, 0.5104, 0.6505],
[0.6519, 0.5883, 0.4599]]) 方差: tensor([[0.0546, 0.0418, 0.1090],
[0.0280, 0.0484, 0.0503]])
tensor([[[ 0.4168, 0.5568, -1.7200, 0.7464],
[-0.5865, 0.4426, -1.2412, 1.3851],
[ 0.8792, -1.5672, 0.8605, -0.1725]],
[[ 1.3004, -0.5034, 0.5333, -1.3303],
[ 1.3505, -0.0656, -1.4626, 0.1778],
[-0.8480, -0.0826, -0.7264, 1.6570]]])
均值: tensor([0.6486, 0.5667]) 方差: tensor([0.0810, 0.0486])
tensor([[[ 0.8209, 0.9359, -0.9335, 1.0915],
[-0.9069, -0.1676, -1.3772, 0.5096],
[ 1.0264, -1.8107, 1.0047, -0.1933]],
[[ 1.3728, 0.0045, 0.7909, -0.6228],
[ 1.4455, 0.0326, -1.3612, 0.2754],
[-1.3474, -0.5685, -1.2236, 1.2017]]])
 冀公网安备13050302001966号
冀公网安备13050302001966号