
线性判别分析(Linear Discriminant Analysis,简称 LDA)是一种经典的统计学方法,主要用于 特征降维 和 分类问题。
它的核心思想是:寻找一个最佳的线性投影,使得投影后的数据在新空间中,不同类别之间的间隔最大化,而同一类别的数据尽可能聚集,从而提高分类效果。
1. 判别函数
线性判别分析通过假设数据符合高斯分布,来估计一个样本属于某个类别的后验概率。
- 首先,计算一个样本属于每个类别的先验概率(粗略估计)
- 然后,计算一个样本从不同类别中产生的可能性(数据分布)
- 最后,结合两者得到一个样本属于某个类别的后验概率
对于一个新样本,后验概率计算如下(第二项表示先验概率):

假设各类别的数据服从多元高斯分布:

将 \( P(x \mid y = k) \) 的高斯分布形式代入后:

取对数简化:

公式中一共有四项,对于分类问题第二项(假设:所有类别数据协方差矩阵相同)、第三项(常数)对于所有类别都是一样的,可以去掉,并将第一项展开:

再次去掉对分类无关的项(对于分类,第一项对于所有类别计算结果都相同),得到如下:

我们得到 w 和 b 的计算公式:

线性判别分析用于分类的判别函数可以表示如下:

最后,我们使用线性判别函数 \(f(x)\) 来将样本归类到判别分数最大的类别。
2. 核心思想
线性判别分析算法是一个线性分类器。对于线性可分的数据(即数据可以通过一条直线或一个超平面完全分开)分类性能非常好。所以,我们思考下,对于下面这两种分布的数据,哪种能够获得更好的分类器?
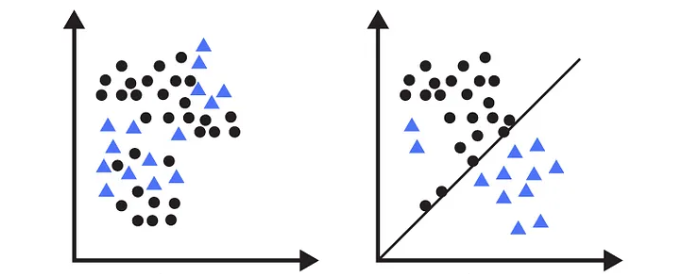
显然,第二种分布的数据训练得到的分类器性能更好。即:为了提高分类器的性能,我们得去优化原始数据的分布。这种优化我们可以通过将数据投影、变换到新的空间来实现。新的空间应该满足什么条件?
在原始数据空间中,数据的分布可能具有以下问题:
- 类间距离不足: 不同类别的均值距离很近,难以分辨。
- 类内分散过大: 同类样本点分布较广,造成边界模糊。
LDA 希望把原始数据投影到一个新的空间(改变数据的分布),这个空间满足:类间距离足够大,类内更加集中。在这个空间中,更容易、更准确的计算分类的判别分数。
为了找到这个满足这个条件的空间,我们接下来,需要进行一些数学公式的推导。
类内的散度矩阵:

- \(p_{k}\) 表示第 k 类的权重
- \(X_{k}\) 第 k 类的样本集合
- \(x_{i}\) 第 k 类别中的样本
- \(μ_{k}\) 是第 k 类的均值向量
类间的散度矩阵:

- \(p_{k}\) 表示第 k 类的权重
- \(μ_{k}\) 是第 k 类的均值向量
- \(μ\) 是所有样本的均值向量
目标:找到一个新空间 W,使得类间散布(分子部分)最大化,同时类内散布(分母部分)最小化。

- \(S_{B}\) 是类间散度矩阵,描述了不同类别之间的离散程度
- \(S_{W}\) 是类内散度矩阵,描述了同一类别内部的离散程度
- \(W\) 是投影矩阵,它表示新空间的投影方向
接下来,通过优化的方式进行推导,目标函数的最大化问题可以转化为广义特征值问题的求解。

其中 λ 是特征值,对应的 W 是特征向量,即:投影矩阵。接下来,我们将数据投影到新的空间中,再计算样本属于每个类别的分数。


公式中,出现两个 W 的计算,其中一个 W 用于将输入的数据投影到新的空间。偏置项计算完成之后是一个 (n_classes, n_classes) 形状,我们使用 diag 取对角线的值。
3. 计算过程
通过前面的学习,我们已经了解线性判别分析算法的分类原理,接下来,我们通过代码来展示其具体的计算过程,从而加深对算法原理的理解。
3.1 分类计算
import numpy as np
from sklearn.discriminant_analysis import LinearDiscriminantAnalysis
from sklearn.datasets import make_classification
from sklearn.model_selection import train_test_split
from scipy import linalg
X, y = make_classification(n_samples=1000, n_features=5, n_informative=5, n_redundant=0, n_classes=3, random_state=42)
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
def test01():
estimator = LinearDiscriminantAnalysis(solver='eigen')
estimator.fit(X_train, y_train)
print('Acc: %.3f' % estimator.score(X_test, y_test))
def test02():
# 类别均值
class_means = np.zeros((3, 5))
for i in range(3):
class_means[i, :] = np.mean(X_train[y_train == i], axis=0)
# 计算每个类别的先验概率
counts = np.array([sum(y_train == label) for label in [0, 1, 2]])
priors = counts / len(y_train)
# 类内散度
sw = np.zeros(shape=(X_train.shape[1], X_train.shape[1]))
for label in range(3):
xc = X_train[y_train == label, :]
xw = np.zeros(shape=(X_train.shape[1], X_train.shape[1]))
for x in xc:
x_centered = x - class_means[label]
x_centered = x_centered[:, None]
xw += (x_centered @ x_centered.T)
xw /= xc.shape[0]
xw *= priors[label]
sw += xw
# 计算类间散度
sb = np.zeros(shape=(X_train.shape[1], X_train.shape[1]))
total_mean = np.mean(X_train, axis=0)
for label in range(3):
xb_centered = class_means[label, :] - total_mean
xb_centered = xb_centered[:, None]
sb += priors[label] * xb_centered @ xb_centered.T
# 计算投影空间
eigen_value, eigen_vector = linalg.eigh(sb, sw)
eigen_vector = eigen_vector[:, np.argsort(eigen_value)[::-1]]
# 计算决策函数参数
w = np.dot(class_means, eigen_vector)
b = -0.5 * np.diag(np.dot(class_means, eigen_vector) @ np.dot(class_means, eigen_vector).T) + np.log(priors)
# 测试集评估
y_correct = 0
for x, y_true in zip(X_test, y_test):
scores = np.dot(x, eigen_vector) @ w.T + b
y_pred = np.argmax(scores)
y_correct += (y_pred == y_true)
print('Acc: %.3f' % (y_correct / len(y_test)))
if __name__ == '__main__':
test01()
test02()
3.2 降维计算
LDA 是一种有监督的降维技术:
- LDA 寻找一个 类间距离足够大,类内更加集中 的投影空间
- 当进行分类时,会将原始数据投影到该空间进行分类计算,此时并不关心投影的维度,一般保留原始数据维度大小
- 当进行降维时,会将原始数据投影到该空间中最重要的 N 个方向上,这里重要指的是,该方向更有利于区分不同类别的数据
前面计算投影空间时,得到的 eigen_value、eigen_vector 表示的含义:
- eigen_value:表示投影的方向的重要,该值越大,说明在这个方向上的投影越能区分不能类别的数据
- eigen_vector:表示真正的投影方向,通过 eigen_value 的降序排列,使得越重要的投影方向越靠前
最后,我们将原始数据投影到 eigen_value 最大的前 N 个 eigen_vector 的方向,就可以实现降维。
import numpy as np
from sklearn.discriminant_analysis import LinearDiscriminantAnalysis
from sklearn.datasets import make_classification
from sklearn.model_selection import train_test_split
from scipy import linalg
X, y = make_classification(n_samples=100, n_features=5, n_informative=5, n_redundant=0, n_classes=3, random_state=42)
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
def test01():
estimator = LinearDiscriminantAnalysis(solver='eigen', n_components=2)
estimator.fit(X_train, y_train)
X_train_transform = estimator.transform(X_train)
print(X_train_transform)
def test02():
# ... 得到投影空间
# 数据降维
n_components = 2
X_train_transform = X_train @ eigen_vector
X_train_transform = X_train_transform[:, :n_components]
print(X_train_transform)
if __name__ == '__main__':
test01()
print()
test02()
 冀公网安备13050302001966号
冀公网安备13050302001966号